PROTOTYPES MADE FROM LEGOS (Page 1 of 3)
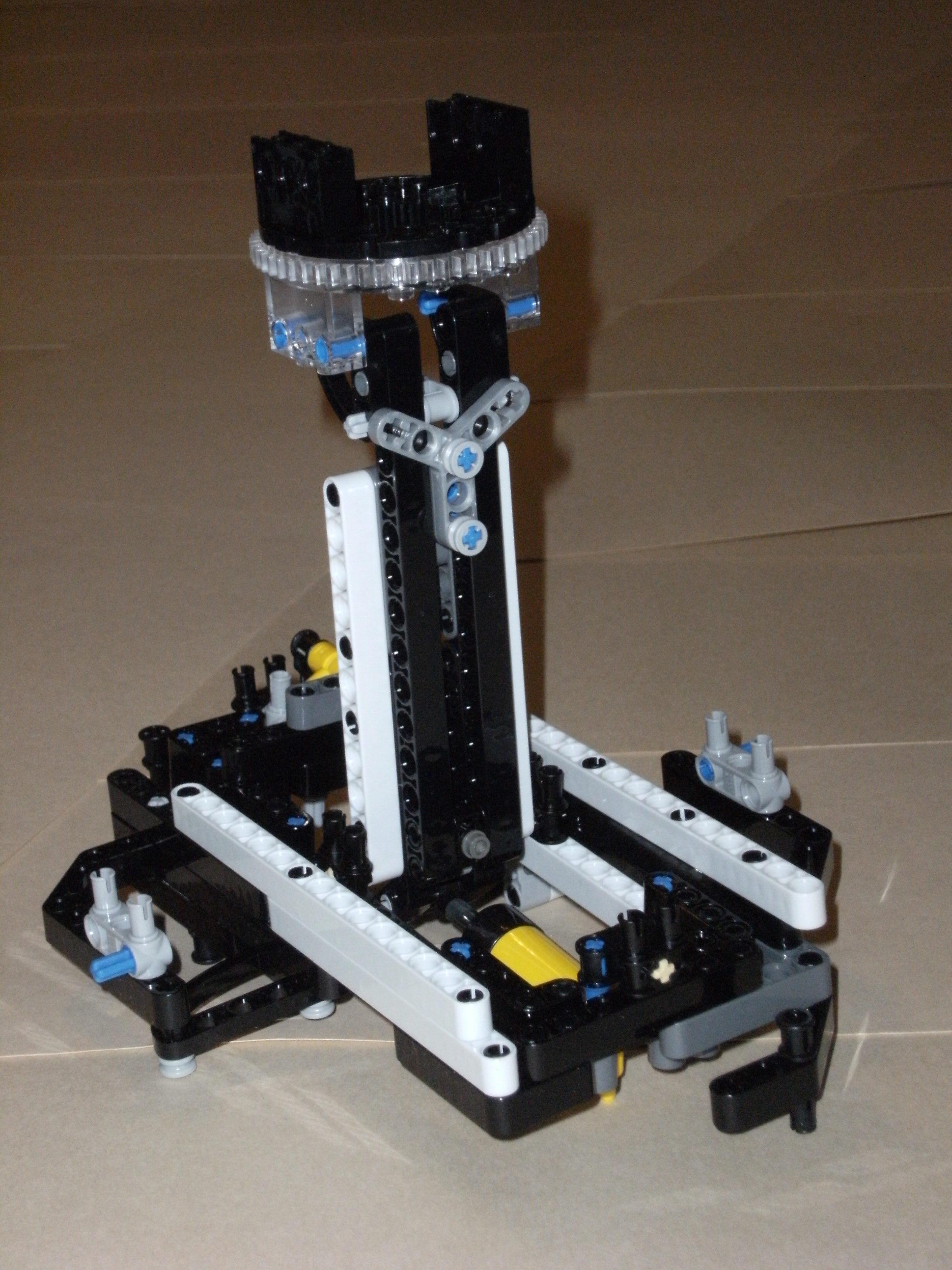
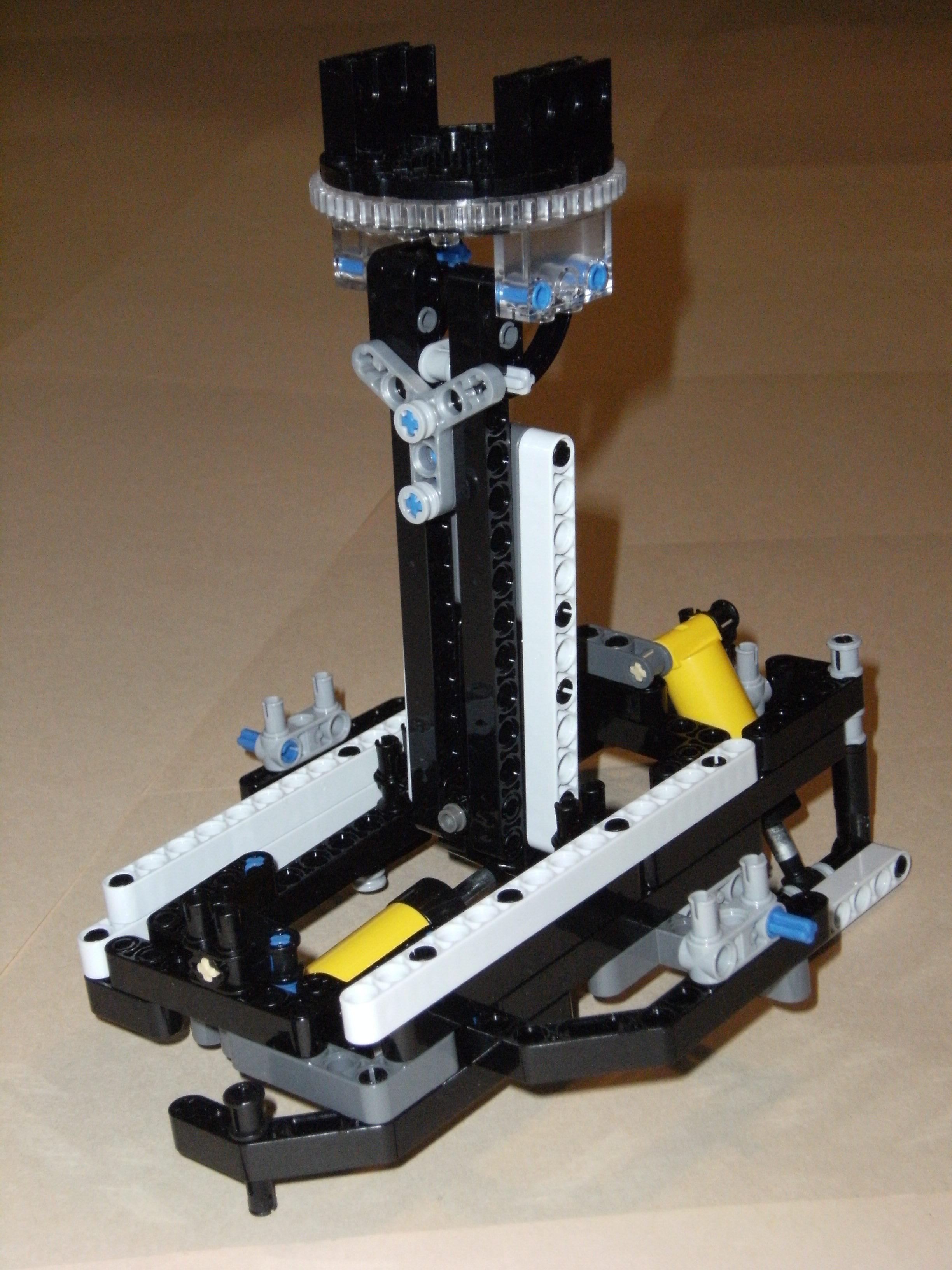
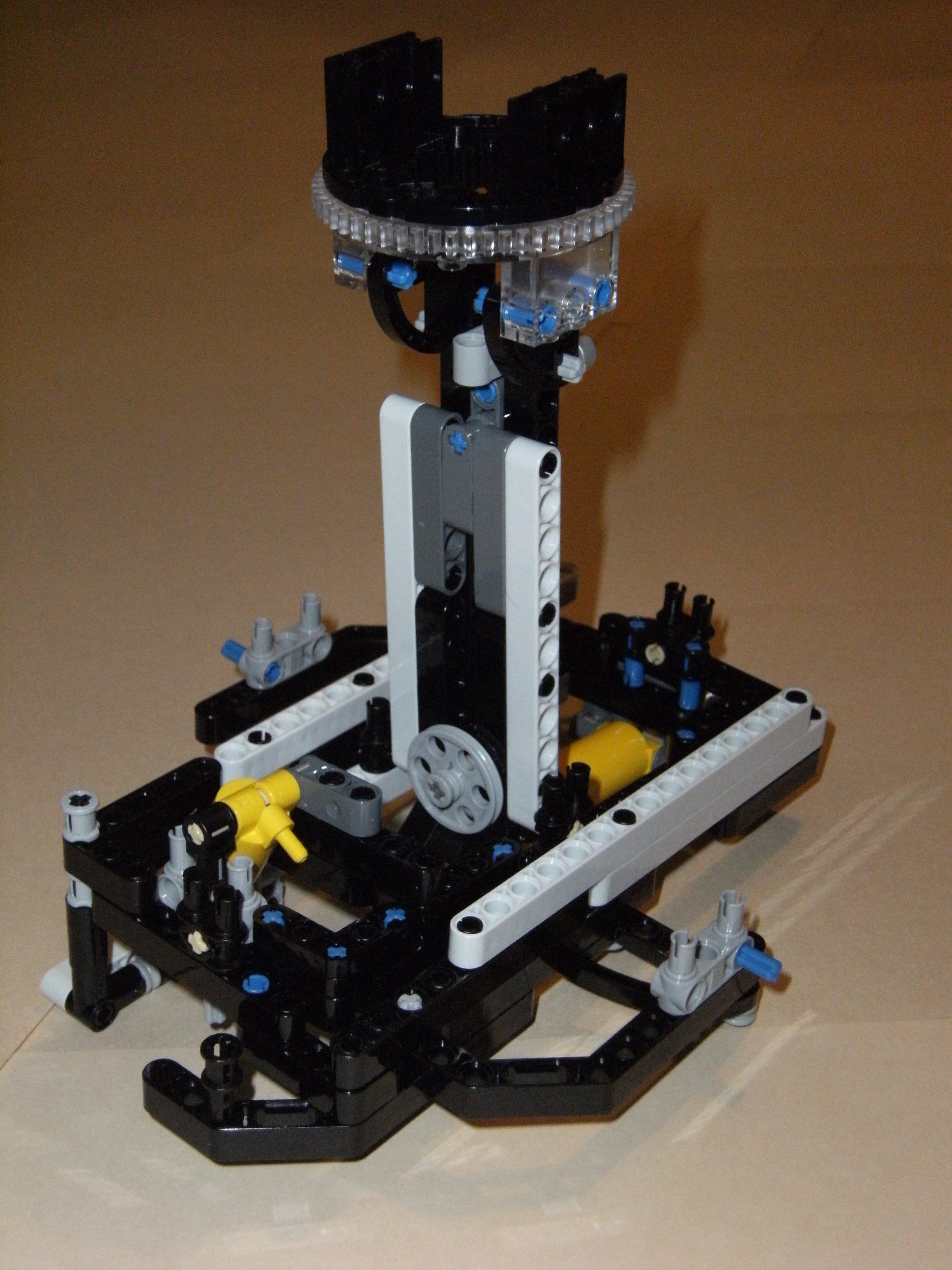
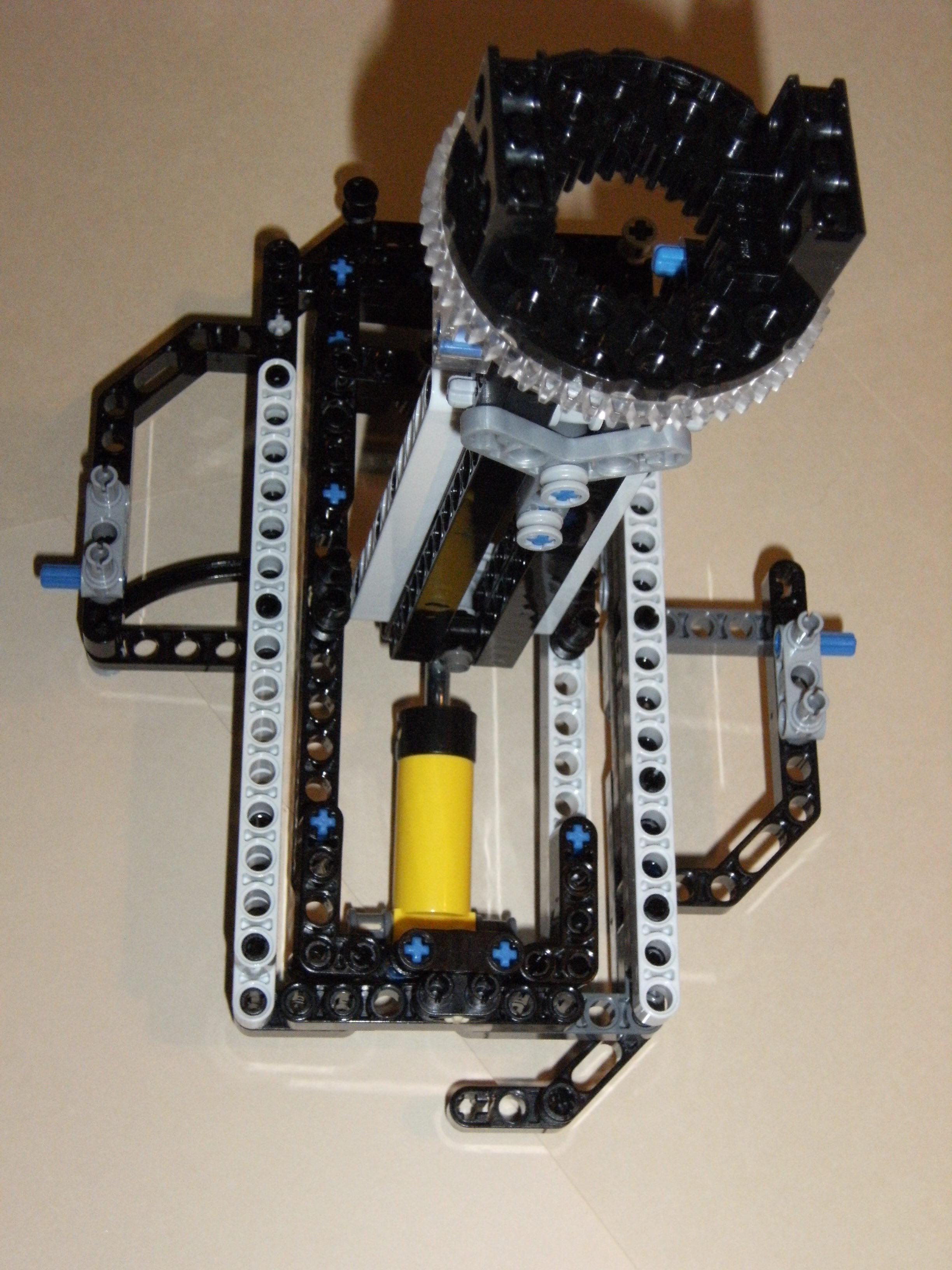
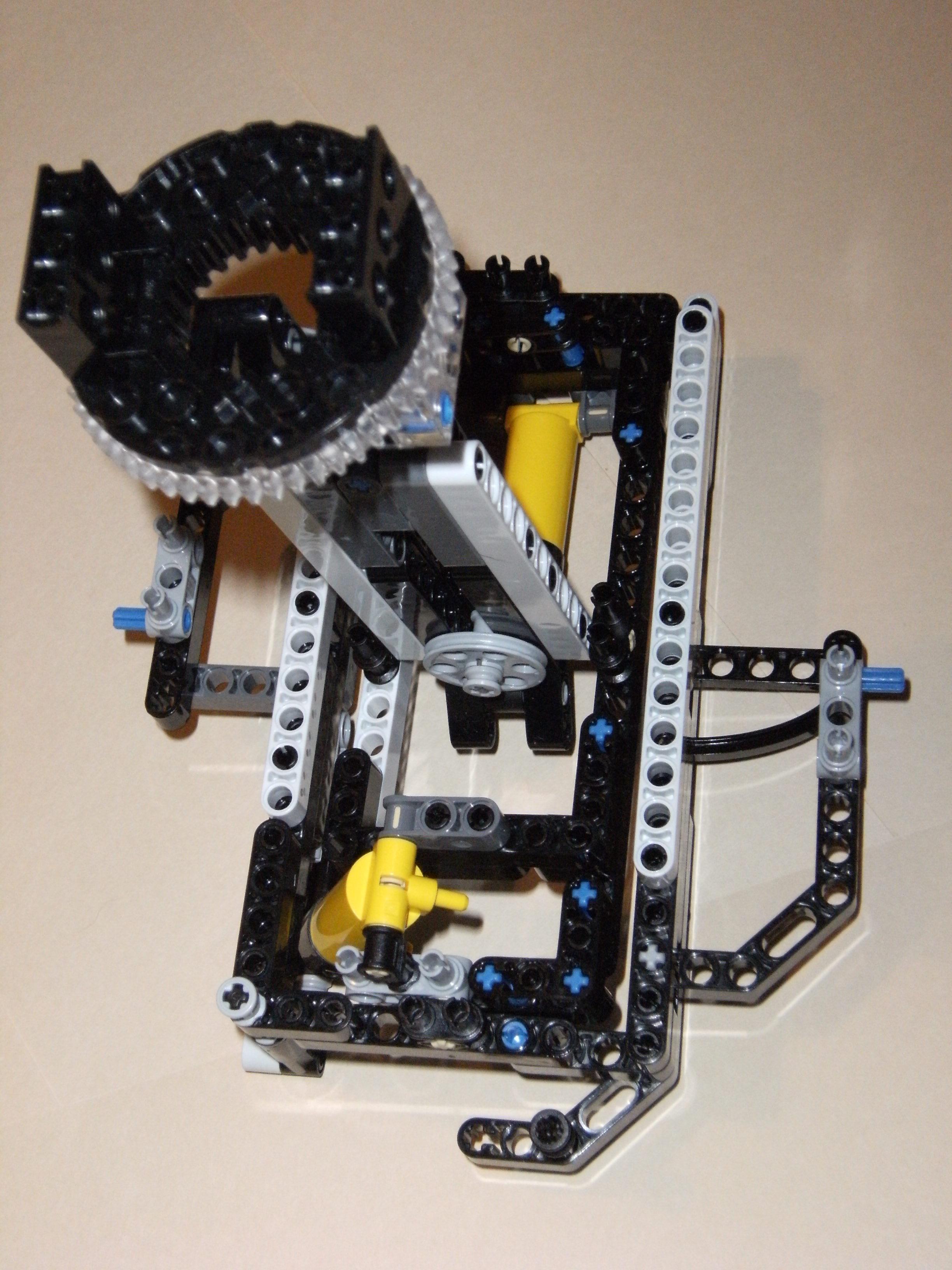
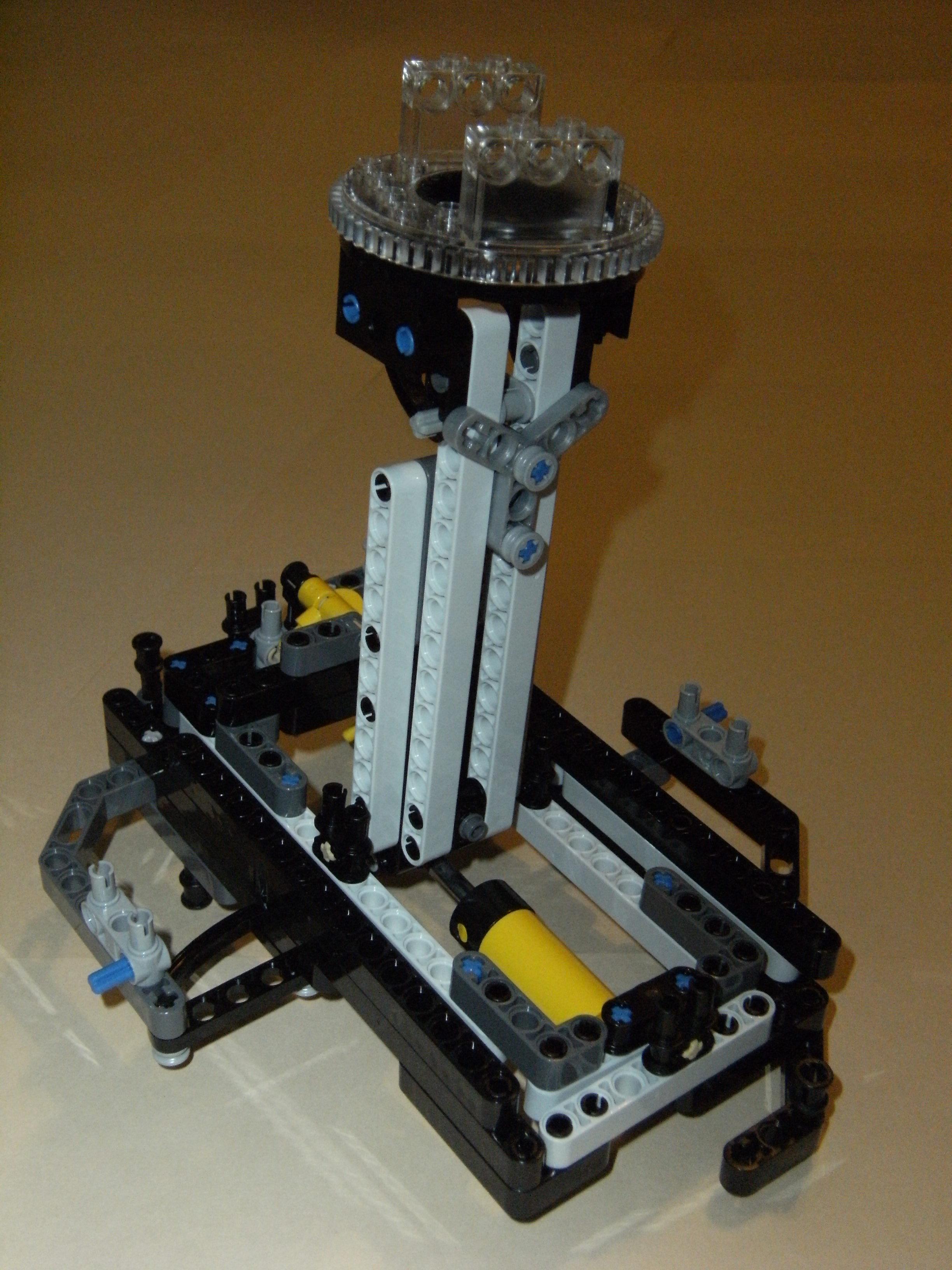
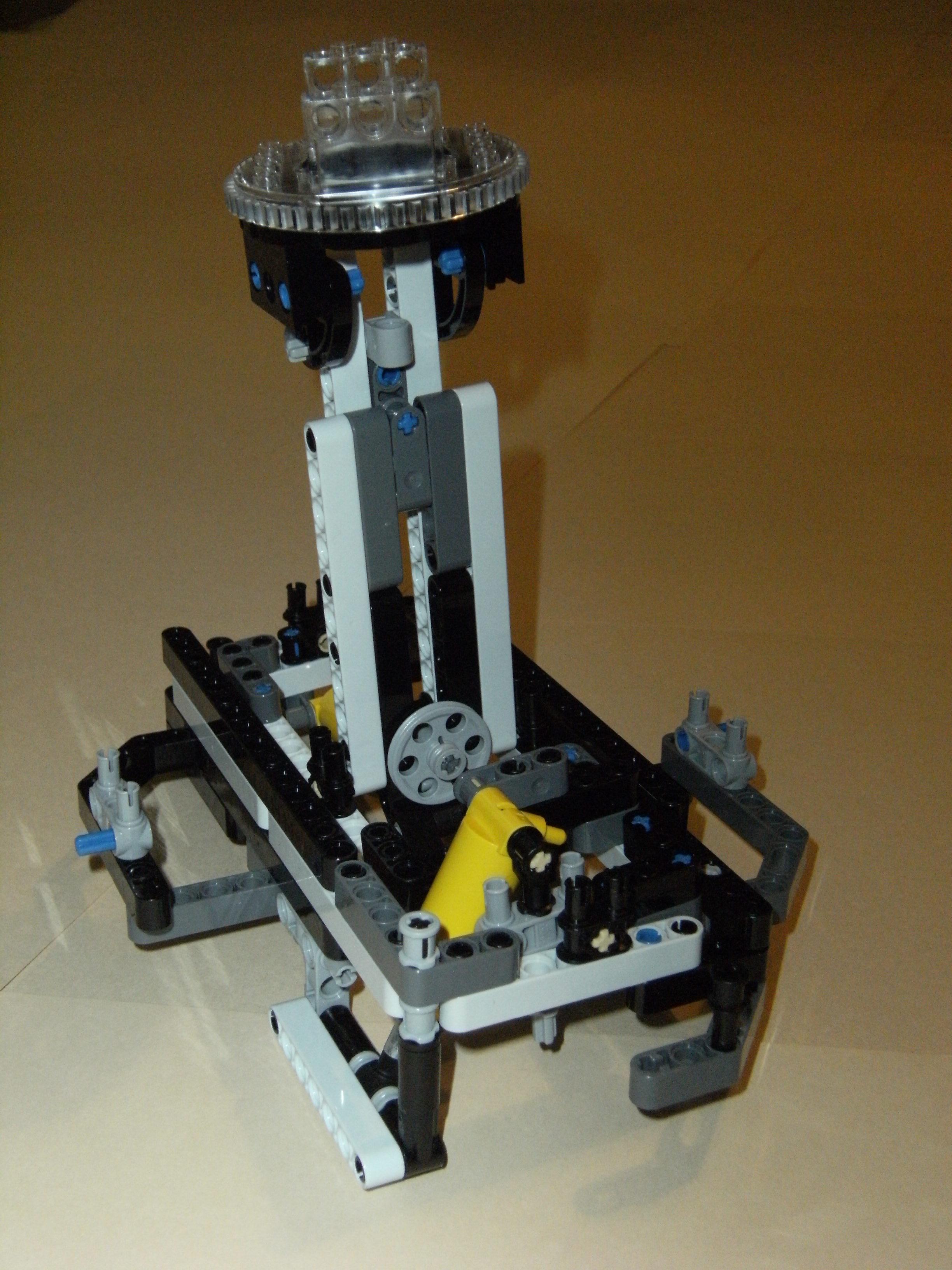
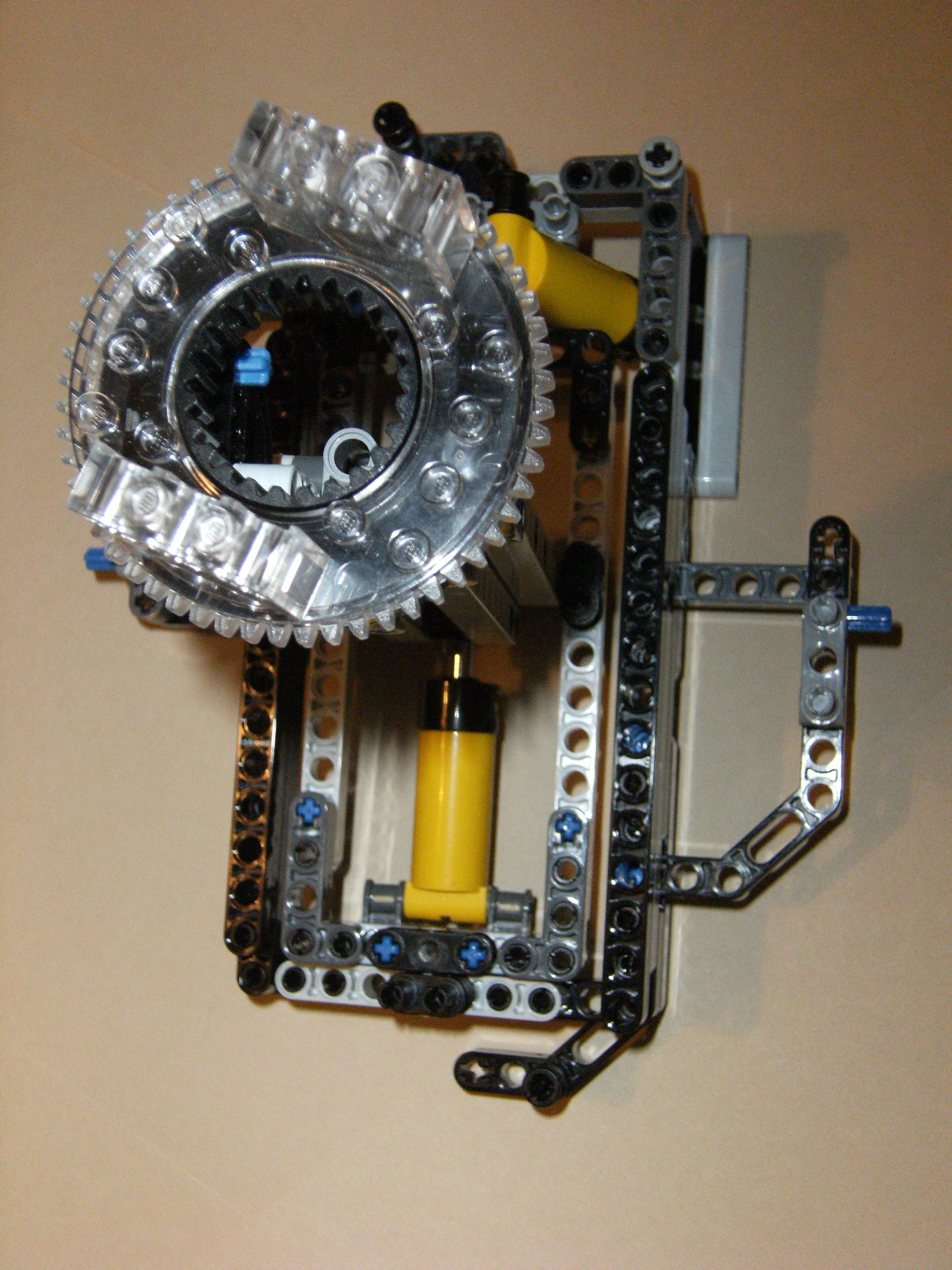
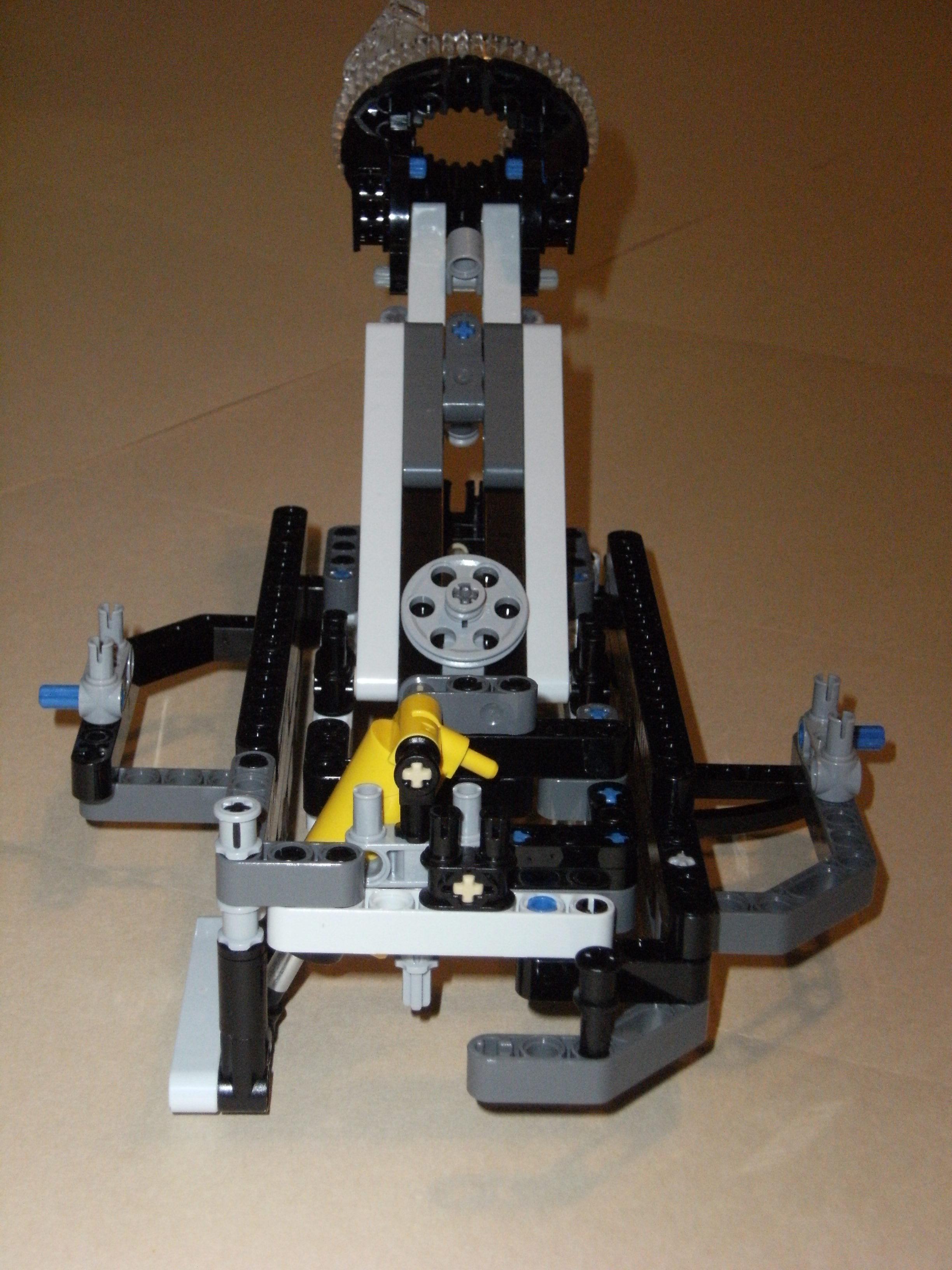
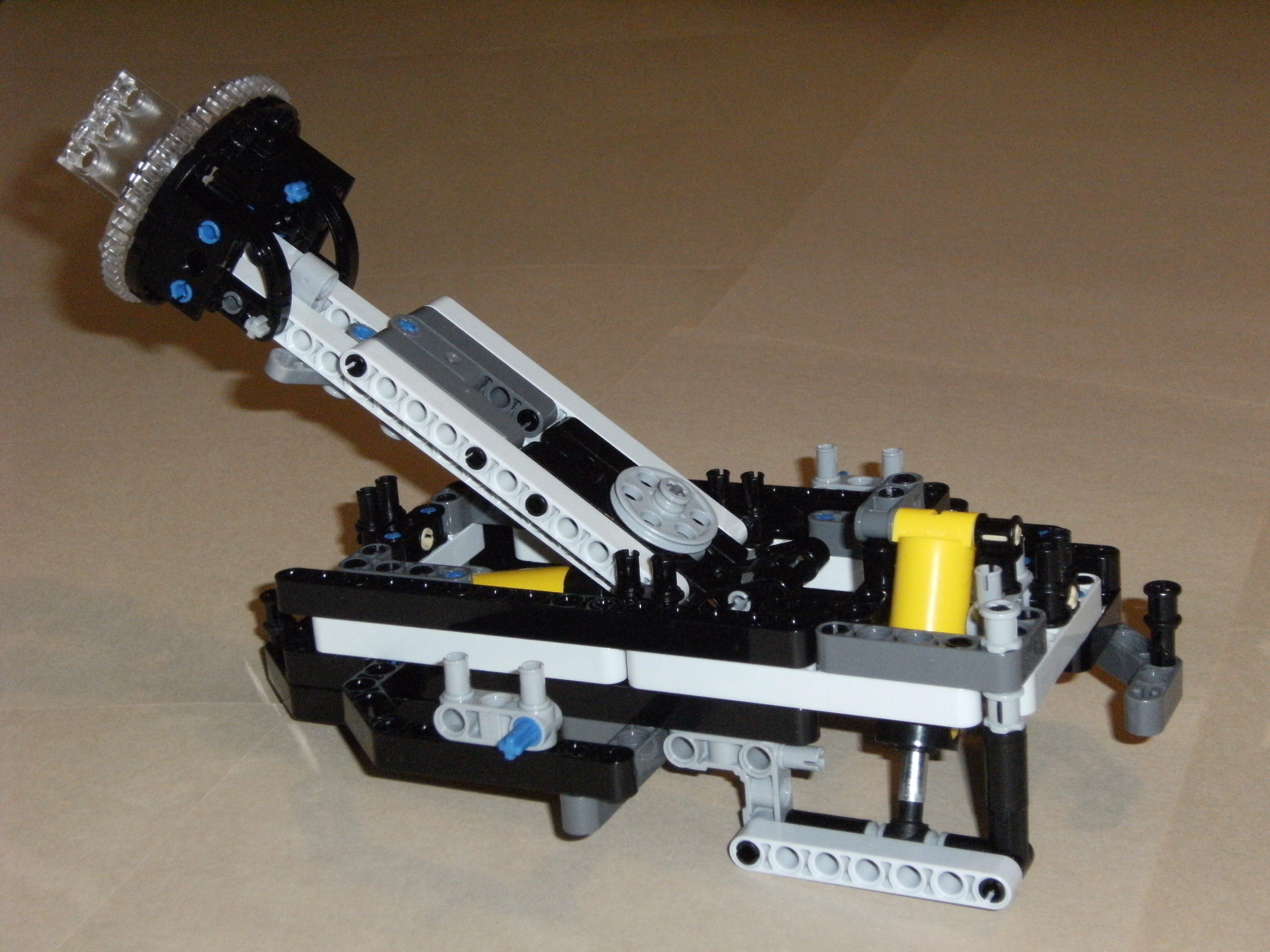
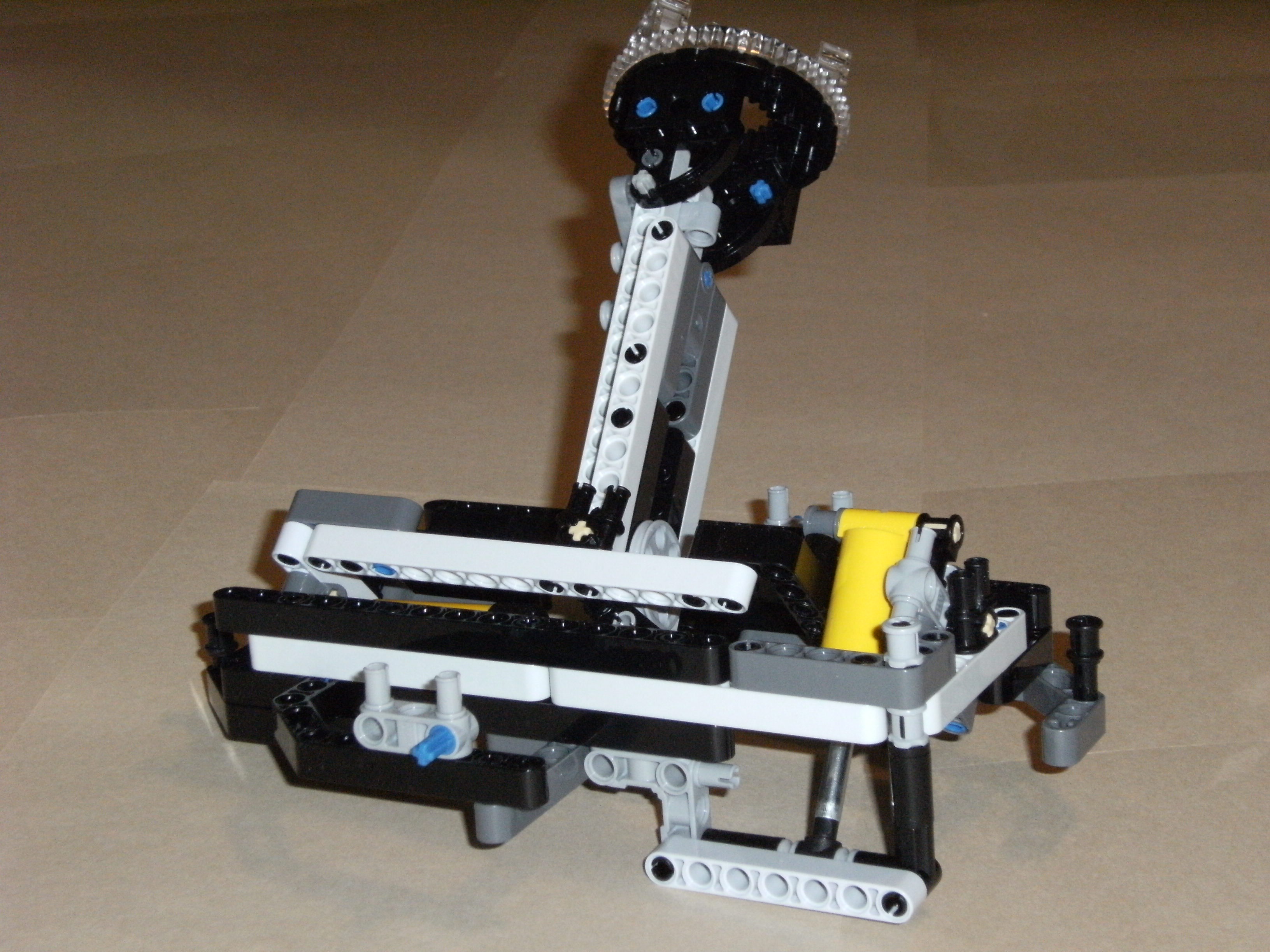
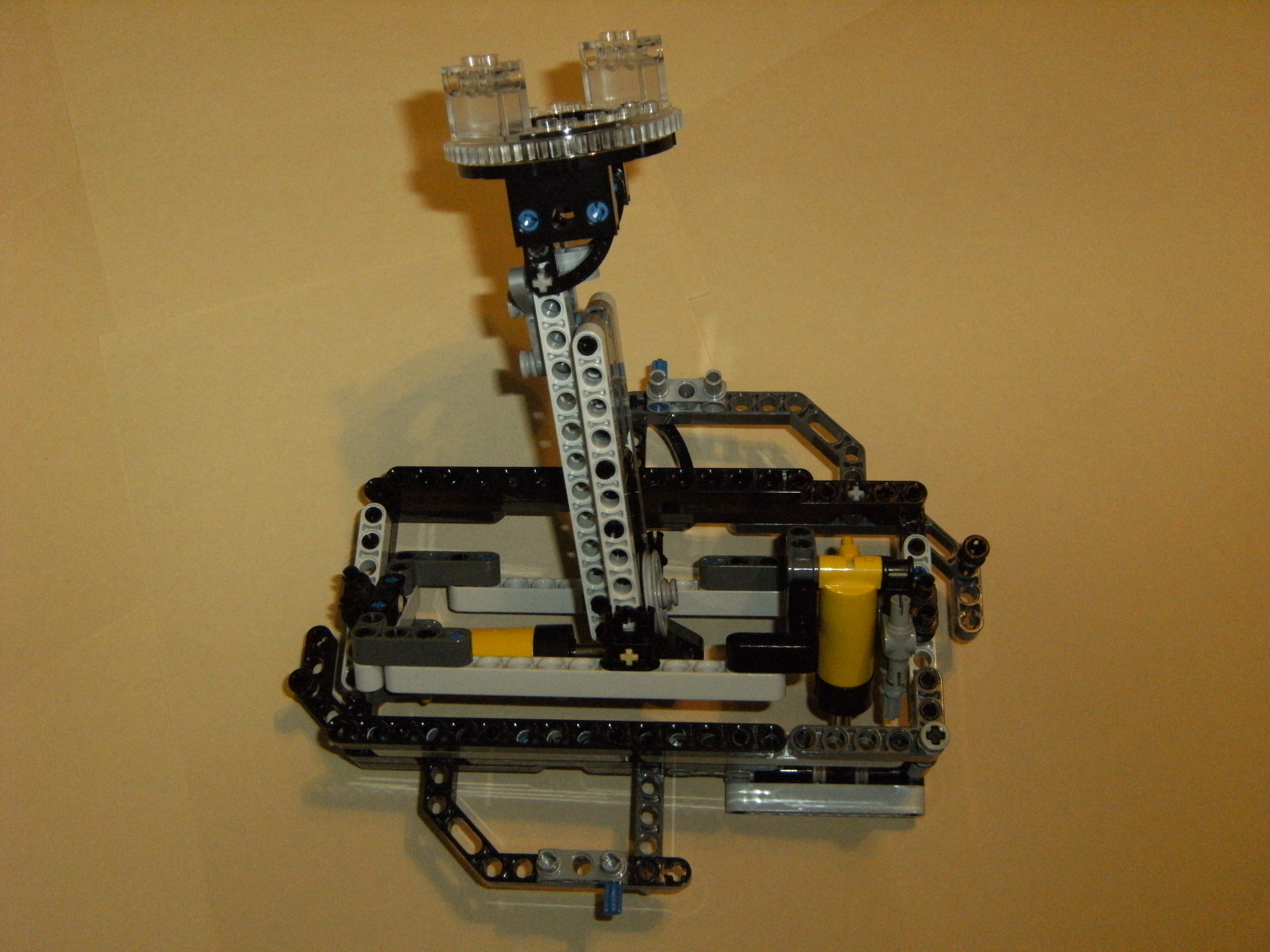
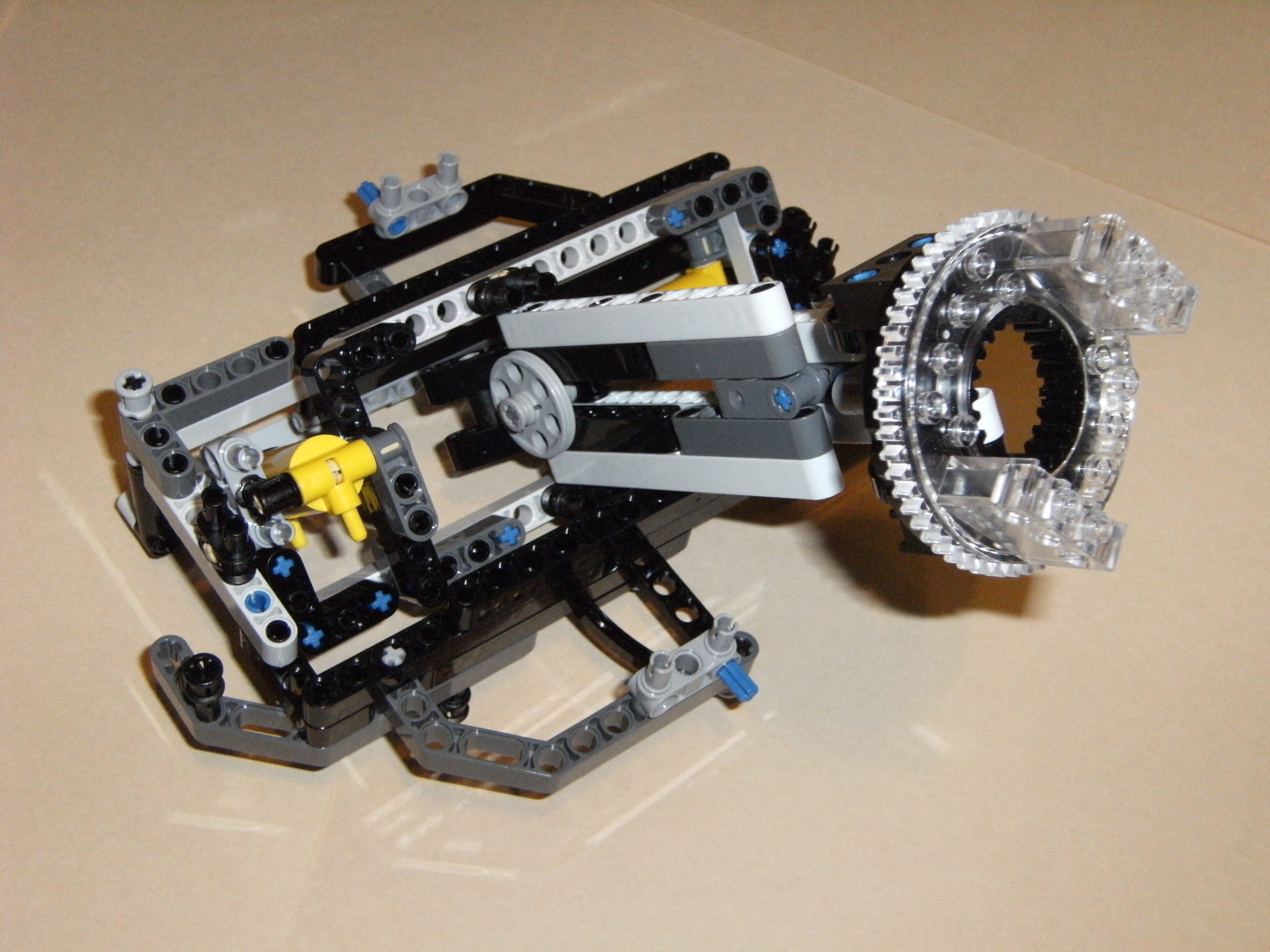
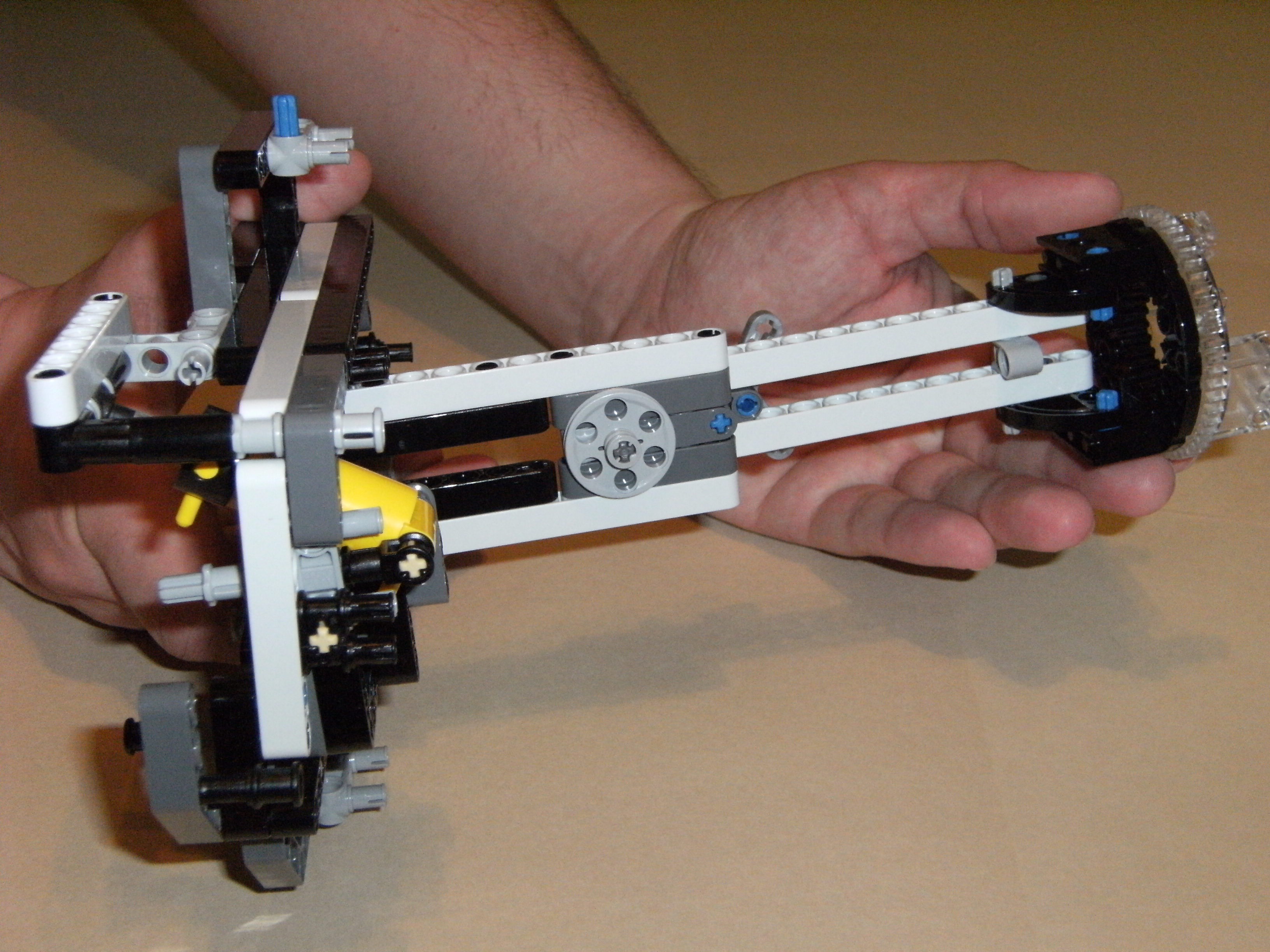
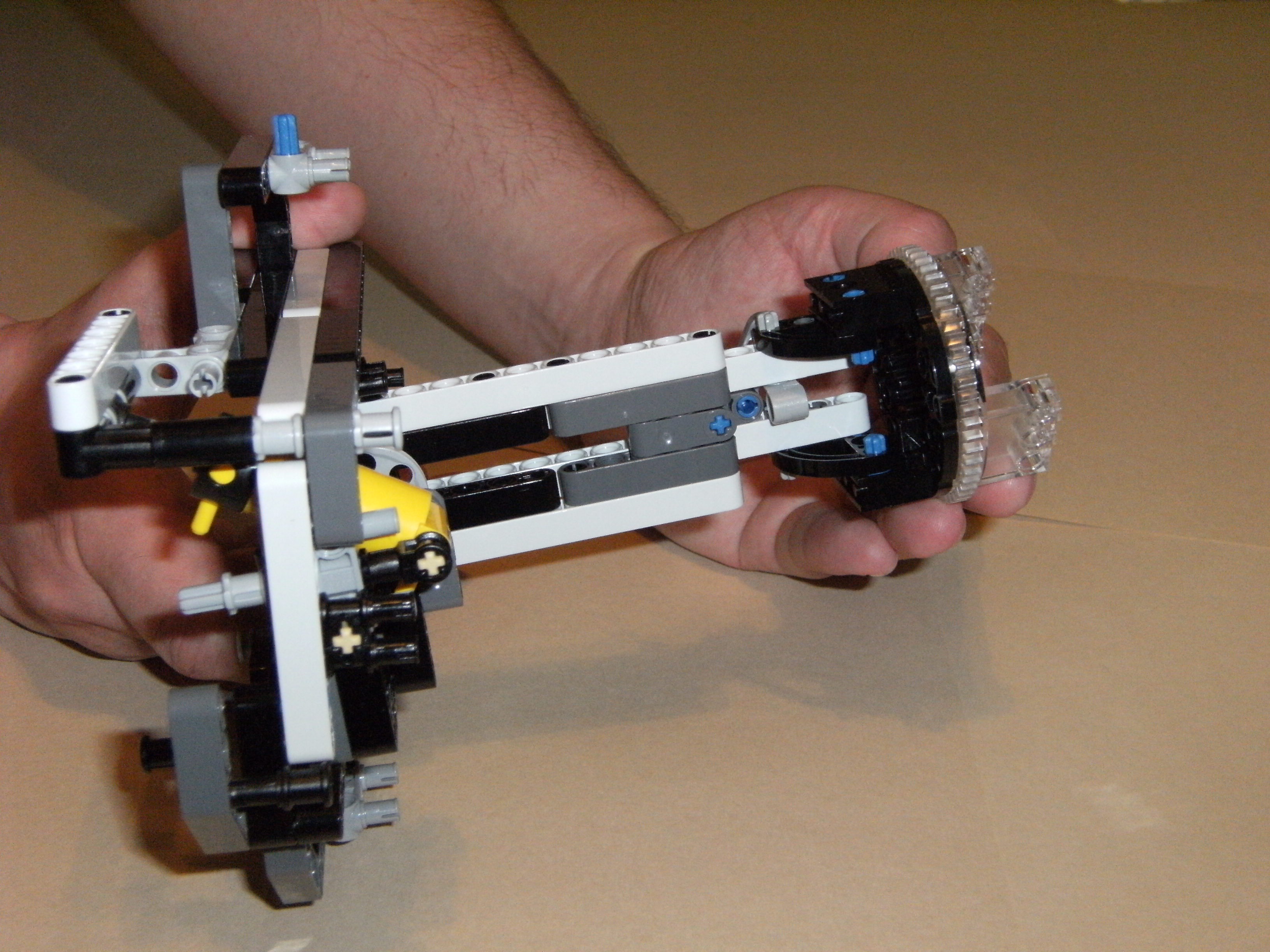
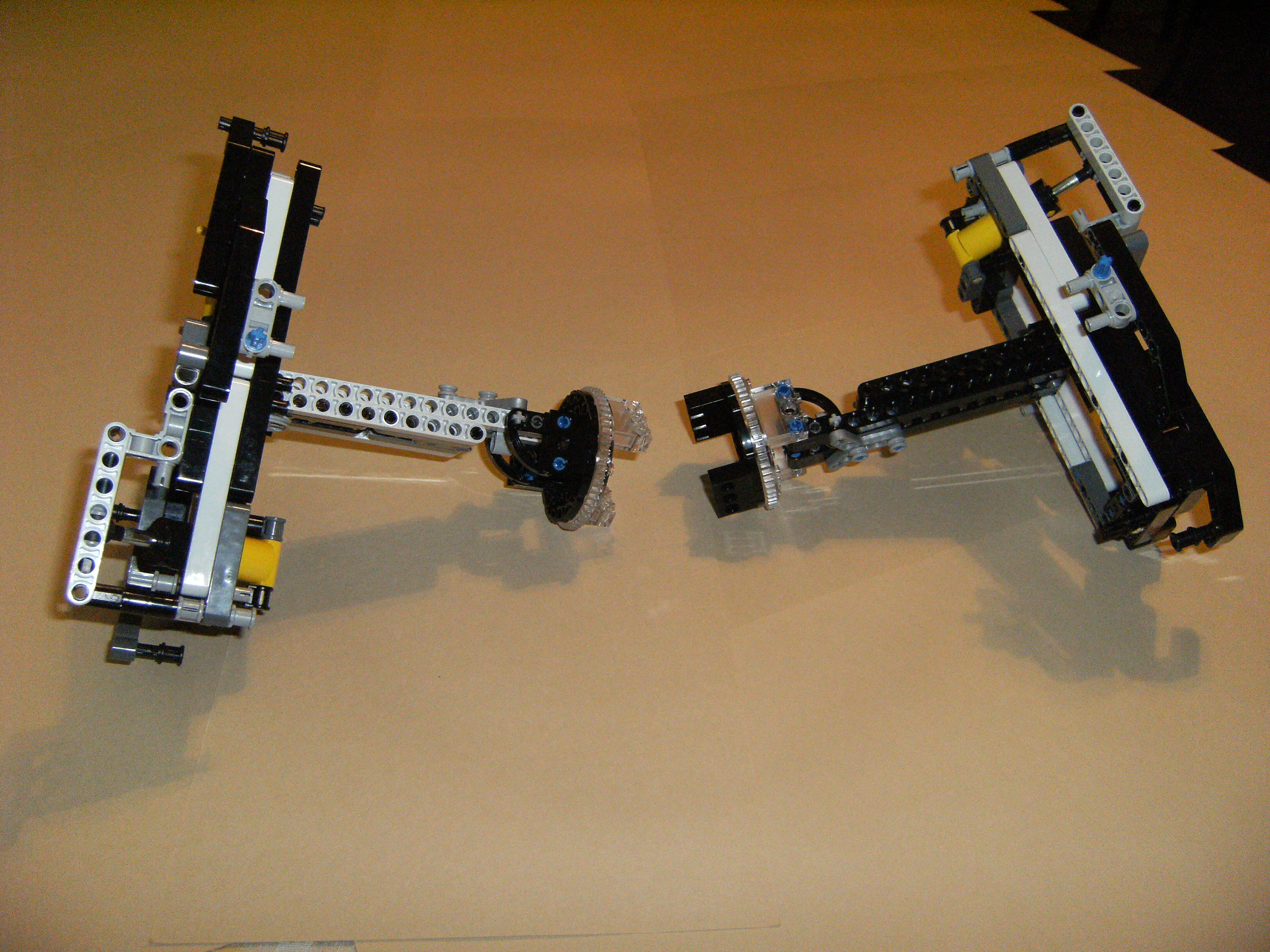
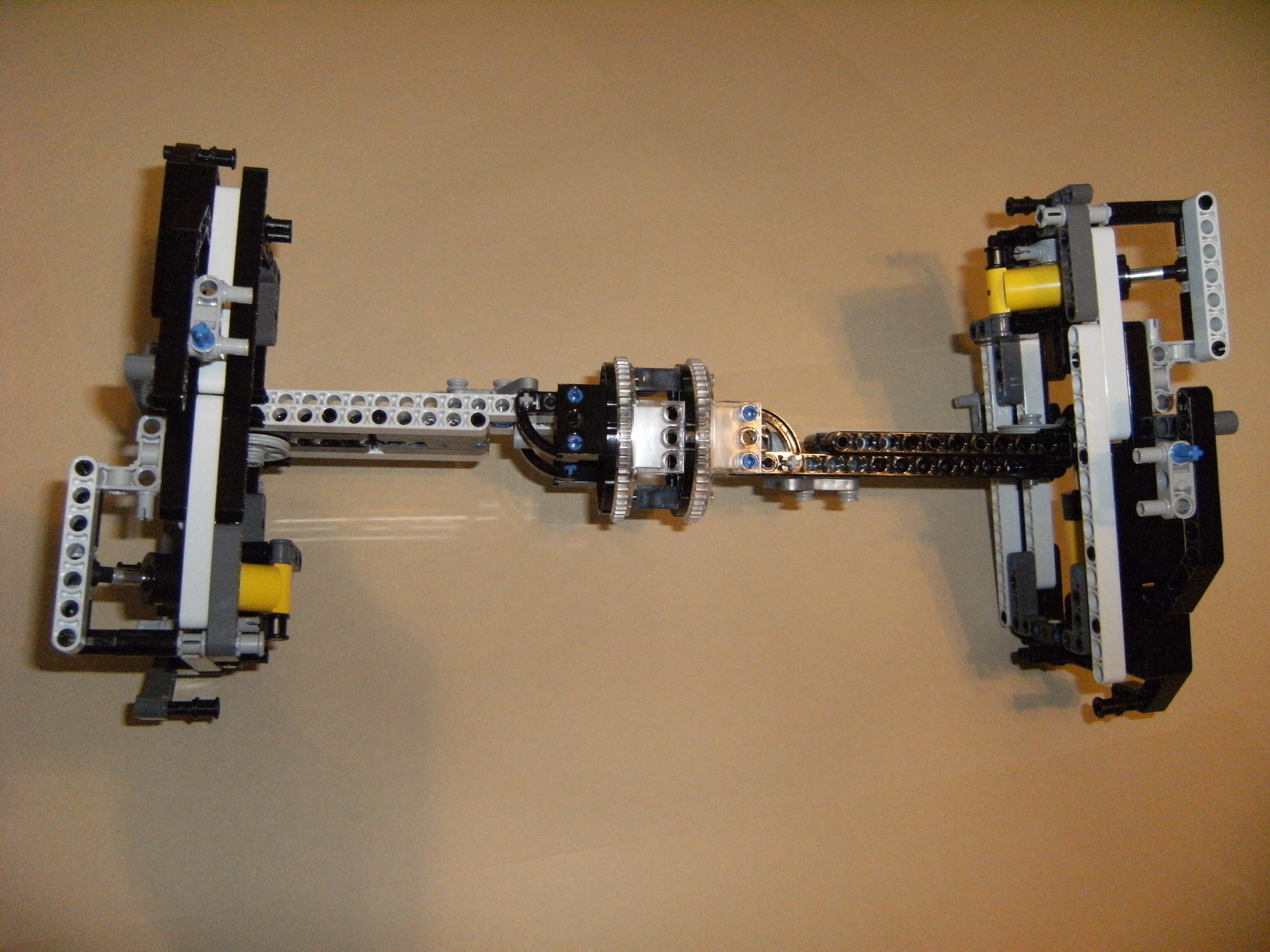
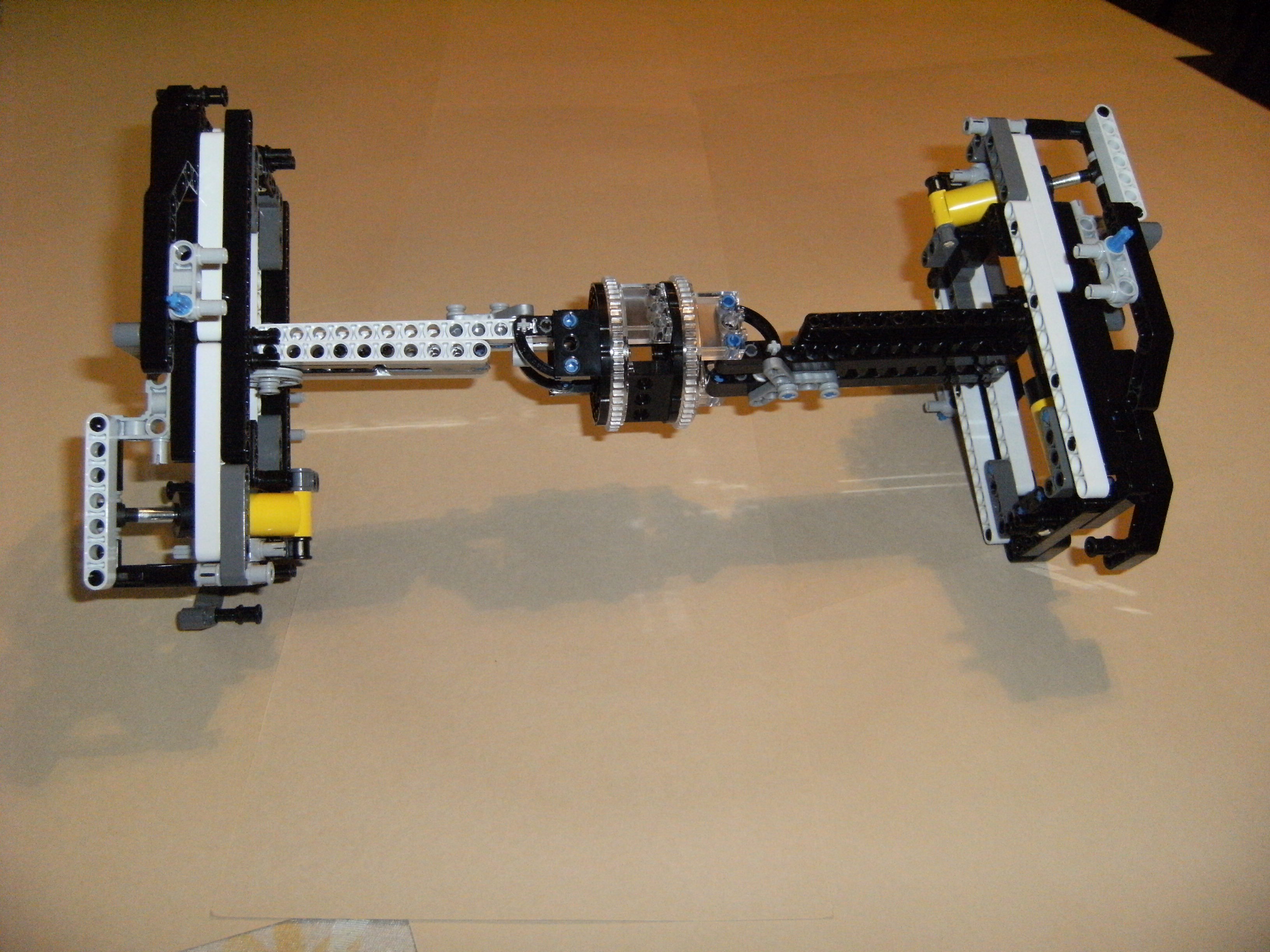
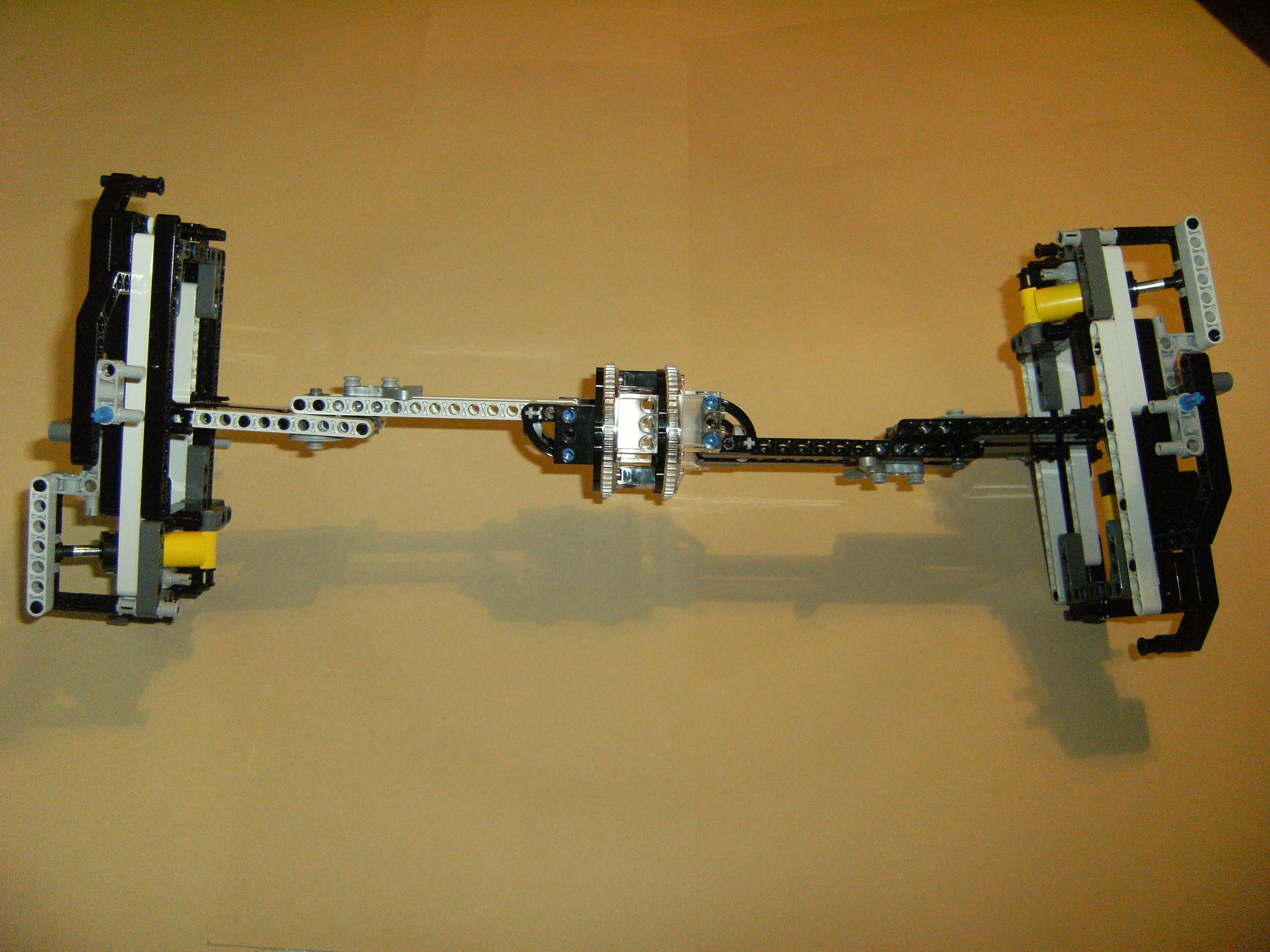
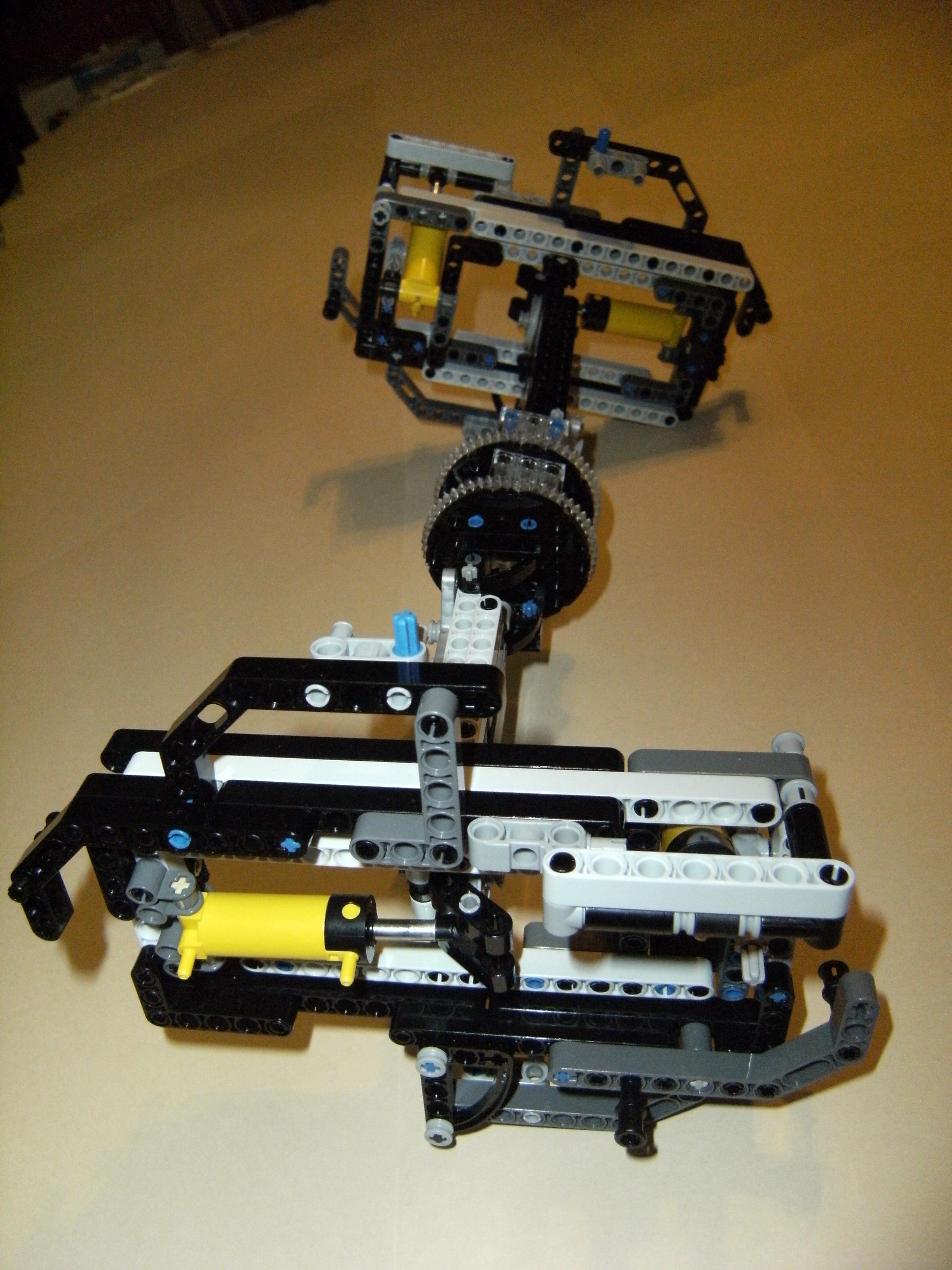
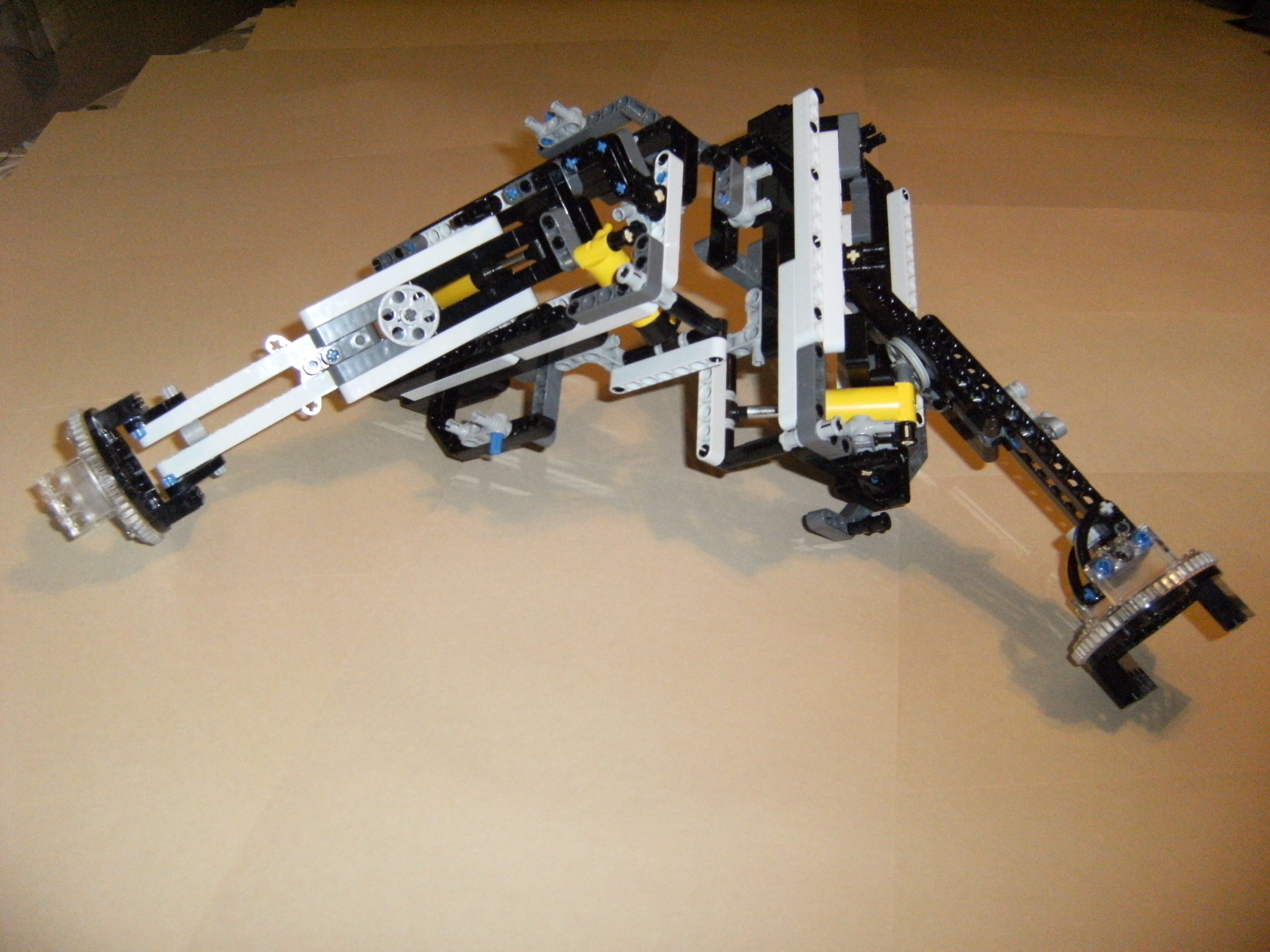
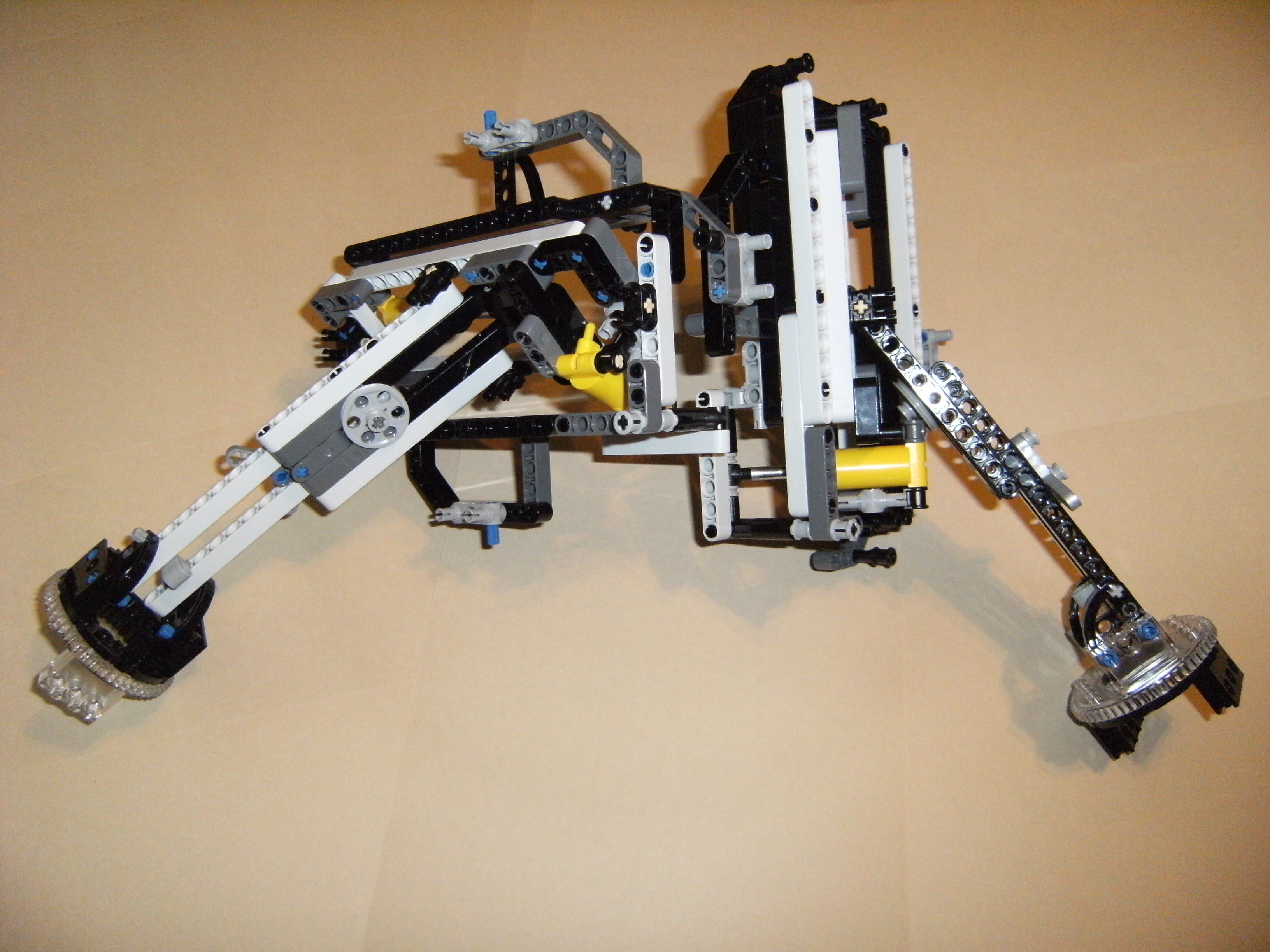
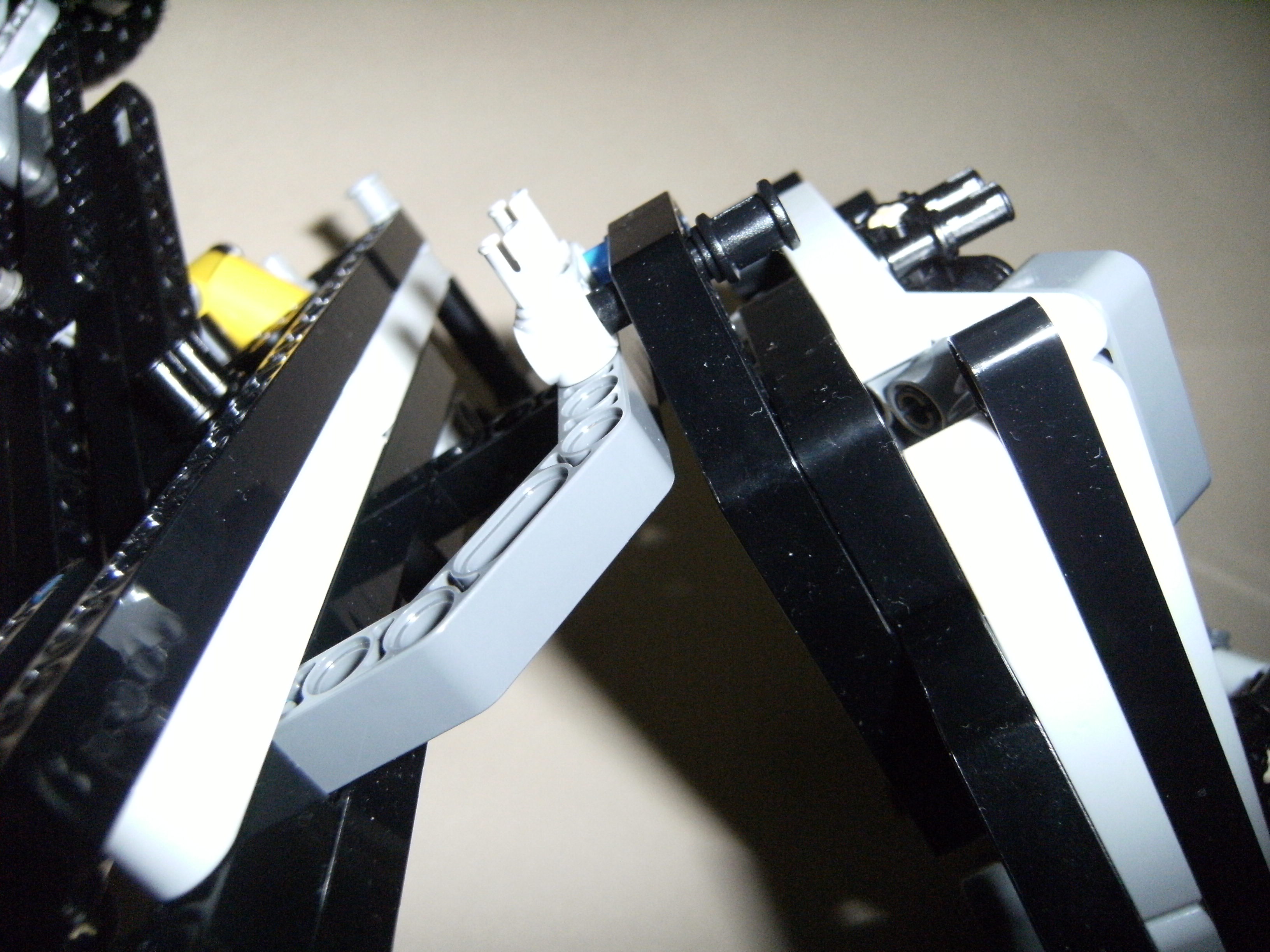
These photos show a prototype module, basic articulation capabilities, and connections between two modules.
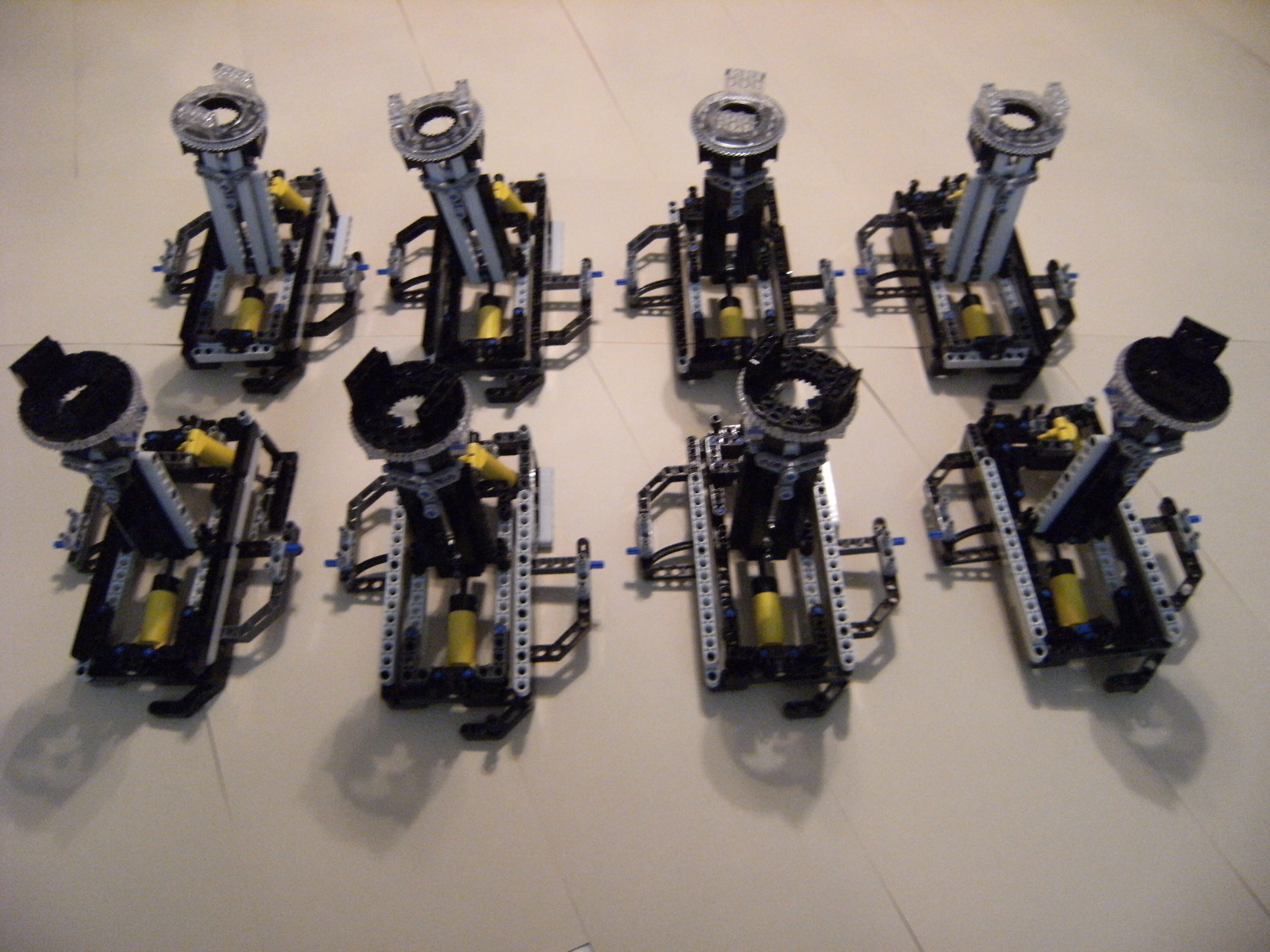 Supply of 6 modules
Supply of 6 modules
Figure 1. Side view
| [EMBED VIDEO HERE]
A Single Module |
This video shows a Lego mock-up of a single module’s motion and movement capabilities:
|
|
|
[EMBED VIDEO HERE] Two Module |
This video of two Lego mock-ups of a module shows how they can be connected together:
|
|
|
[EMBED VIDEO HERE] Three Module |
This video has three Lego mock-ups of a module. Two of them are initially connected along their sides to each other. The video will show the third one being connected to each of the two that are connected together in such a way that they all share a common cube corner. | |
|
[EMBED VIDEO HERE] Mesh Connections |
This video consists of an example of a mesh of Lego mock-up modules. It shows how any module in the mesh can be disconnected at one point and reconnected at a different point that is available and within range. | |
|
[EMBED VIDEO HERE] Triple Parallel Mesh |
In this video, a mesh of Lego mock-up modules are connected together. They are connected in such a way that there are two sets of three modules that are connected together to share a common cube corner and the legs from each set connect the two sets together. It shows the motion and shaping capabilities of such a structure. | |
|
[EMBED VIDEO HERE] Genderless Connecting |
This video shows a new improved version of Lego mock-up modules. The connecting plates are now gender-independent, meaning any two modules can connect together via their connecting plates. This is illustrated in this video by showing 3 modules all able to connect to each other via their connecting plates. | |
|
[EMBED VIDEO HERE] Part 1 of 2 |
Self-Reconfiguring Technology: Universal Module-Cell Utility System – “a concept”
Part 1 of 2: Modules and Cells Section 1: Module Assembly Components |
|
|
[EMBED VIDEO HERE] Part 2 of 2 |
Self-Reconfiguring Technology: Universal Module-Cell Utility System – “a concept”
Part 2 of 2: Connecting and Disconnecting Section 6: Reconfiguring 3 “3-Dimensional” Cells into 4 “2-Dimensional” Cells |
| [EMBED VIDEO HERE]
Exploring Inductors |
In this video, inductance for transducer-to-transducer applications and the benefits to self-reconfigurable technology will be examined.
|
This terminology does not necessarily adhere to strict technical formality. It is only meant to serve as a reference guide for standardization of their use in the articles. Some of the older versions of articles do not yet comply with this standardization.
| TERM | WORKING DEFINITION OR EXPLANATION |
|---|---|
| cell | a collection of between two to six modules connected to each other via their rectangular bases a matrix element made up of at least three modules that are connected together in such a way as to share a common corner of a partial cube |
| full cell | a matrix element that consists of six modules and does not necessarily include a power cell; a cell that is not full consists of between 2 and 5 modules |
| complete cell | a matrix element made up of six modules (a full cell) and a power cell |
| pseudo-cell | a cell consisting of 2 modules |
| inverse cell | two modules connected to each other via their connecting plates |
| matrix | a group of modules or cells joined together primarily in a pattern |
| mesh | a cell matrix made up of a random arrangement of connections and positions |
| module | one of two fundamental elements that is a component in a matrix cell; an assembly of fabricated components; six modules make a full cell; this assembly consists of two ends connected together by a telescoping shaft, and contains moving parts, actuators, and electronics; one end is a connecting plate that can rotate about the axis of the telescoping shaft and can connect to the connecting plate of another module; the other (cell core fragment) end can connect directly to up to four other modules and a powercell (these four modules form a ring with the powercell in the center), to form the core of a cell, and a sixth module can connect to this core (on the “opposite side”) to form a full cell |
| powercell | one of two fundamental elements that is a component in a matrix cell; a cube-shaped housing for an electrical battery; the position of the conductors on the face of the cubes are arranged in a symmetric pattern that prevents reverse polarity from being possible |
| module component | one of the basic module assembly elements: the rectangular base, universal joint, telescoping shaft (leg), or connecting plate |
| module assembly | a single module, made up of the module components |
A number pattern convention can be used to identify modules when they are brought together to form a cell. In the Image below, Figure A shows a 3-dimensional cube with the faces that are showing numbered 1, 2, and 3 in a counter-clockwise direction about their common corner. Figure B shows the cube unfolded to indicate how all the faces of the cube are numbered in relation to each other. The numbering convention for determining which faces have values 4, 5, and 6 is to arrange them so that the sum of the values from each pair of opposite faces is equal to 7.
A cell module consists of several moving parts. There are 4 basic assemblies that make up a cell module, and each assembly consists of several components. The following is a list of the assemblies and the mechanical components of each assembly involved in the interaction between assemblies and modules (all assemblies consists of internal mechanical components that are not included here):
The following list describes all of the types of assembly movements:
The following list describes all of the types of inter-modular connections:
When two modules connect to, or just come in contact with, each other with the connecting plate surfaces, there are 3 ways this can happen. One way this can happen is if the surfaces only touch each other, but there is no interlocking bond; only pressure or stability are involved, and only pushing but not pulling can take place between the two modules. Another way this can happen is if there is a mechanical interlocking bond; this would be the prefereable means for long term or unpowered bonds. The last is if there is a powered electrical bond; if energy is removed, then the bond is broken; this would be the preferable means of bonding two modules in situations where connections have a very short duration and there is frequent connecting and disconnecting activity. A bond involving both mechanical and powered electrical means is possible and could be considered a fourth way, but in practice this would be extraneous or unnecessary (unless the interlocking mechanism is designed to be breakable by excessive tension and the powered electrical bond is necessary for providing more strengh).
There are 4 types of schematic symbols for depicting 2 modules in contact with each other. In the image below, Figure 2a shows 2 modules A and B connected to each other without reference to the type of bond; Figure 2b shows 2 modules A and B connected without either type of bond; Figure 2c shows 2 modules A and B connected with only a powered electrical bond; finally, Figure 2d shows 2 modules A and B connected with at least a mechanical bond (it either may or may not have a powered electrical bond).
When there is a need for a module at a particular location in a matrix where there currently isn’t one, there is more that one way to get a module to that location. Figure 5a shows a matrix of modules. The top row has a module A at the left end on the diagram. The bottom row has an arbitrary sized series of modules connected together, including modules B, C, and D, along with some unlabeled modules. A module at the right end of the matrix on top of the bottom row is desired, so that there is a pattern arrangment that consists of having a module mounted on top of the module that happens to be labeled D. The labels identifying these modules are only abstract labels, for showing where the modules physically move to when they move around.
One techique of accomplishing this is to take module A and transfer it along the top of the bottom row matrix modules so that the matrix will have a module present at the desired location. Figure 5b shows the matrix with module A moved to the location where a module is desired in the matrix.
If the bottom row of modules is significantly long, there’s a faster and simpler way of getting the same pattern without the need of transferring module A from the left end of the top of the matrix all the way to the right end. This is achieved by placing module D on top of module C to get the matrix arranged in the desired pattern. This is simpler and quicker because it can be done in one move using a different module, instead of several moves based on the number of modules in the bottom row using module A. Figure 5c shows the matrix pattern when this technique is used. In this version, module A can be moved down to the left end of the bottom row if a specific pattern is required on this side.
This technique is beneficial for replacing failed or missing modules, or reshaping a matrix of modules, by significantly reducing the amount of time and energy that would have been consumed if this technique was not utilized. A matrix of modules can easily change from one shape or application to another one that is completely different with a minimal amount of effort by utilizing this technique for every module that needs to be moved into a position in the matrix.
It is possible to recover some of the energy that is expended to vertically move a module. Figure 14a shows a matrix of modules with a single module in the left-most column, shaded blue, and the 2nd from left column of modules are shaded green; these green modules will be used to raise the blue module, and to do this they will actuate the legs that connect to the blue module by pivoting it with an electric motor as they relay it to each other from one module to the one above it.
A module that is shaded green expends energy by actuating to raise the blue module; to indicate that a green module has done this it will be changed to red. Figure 14b shows the 2nd from left module in the bottom row lifting the blue module, which is also connecting to the 2nd from left module in the 2nd from bottom row for repeating the cycle.
As the blue module is raised by the 2nd column of modules each one of these modules expended some energy. All of these modules in the 2nd from left column that were green are now red to indicate that they expended energy after the blue module reached the top row of the matrix, as shown in Figure 14c. Here kinetic energy was converted to potential energy.
Some of the energy that was expended to raise the blue module can be recovered when it gets lowered back down to the bottom of the matrix. Figure 14d shows the blue module beginning its trip back down to the bottom, and it also indicates that the modules in the 2nd column that were red turn back to green as they pass the blue module down to the module below it, in the 2ndform left column, to indicate that energy was retrieved from the process of converting potential energy to kinetic energy with the use of gravity.
This energy can be recovered by using the same electric motor in the actuator that was used to raise the blue module by each of the modules in the 2nd from left column of modules in the matrix as a generator. This process could be used to recharge the same power sources that provided the energy to raise the blue module. This is beneficial because it both saves energy and reduces an undesired build up of heat waste.